Sobre a análise de atividades e suas mimizeiras, limites ou mazelas
Já passaste por alguma(s) dessas situações?
(a) O ciclocomputador diz que estou no plano quando sei que estou subindo.
(b) Saimos em grupo mas, no final, há diferenças absurdas entre o registro de uma pessoa e outra.
(c) Já fiz o mesmo percurso várias vezes, com o mesmo cicloccomputador. E para cada vez, tive um resultado diferente.
(d) o ciclocomputador diz que estou descendo, mas na verdade estou subindo.
(e) em algumas atividades aparece uma velocidade máxima absurda.
(f) numa subida, o ciclocomputador diz que estou parado.
1. Rastro:
As atividades são registradas como uma lista de dados.
Cada linha desta lista é composta por {latitude, longitude, altitude, datahora}.
Intuitivamente presumimos que:
- a pessoa estava em movimento quando {latitude, longitude,altitude} variaram no tempo {datahora}.
- a pessoa estava parada quando {latitude, longitude,altitude} não variaram no tempo {datahora}.
1.1 O que realmente é “parado” nos ciclocomputares e aplicativos?
Ciclocomputares e aplicativos consideram “parado” quando a pessoa está beeeem devagar. Alguns modelos são transparentes, permitindo configurar a velocidade de corte para a pausa automática. Isso já explica uma das situações: Quando estamos subindo uma rampa muito inclinada, (subindo mais do que andando para frente) é a velociade horizontal (para frente, no plano) diminui, aproximando-a da velocidade de corte. O ciclocomputador tende a achar que estamos realmente parando para uma pausa.
2. Falso movimento ou Drift :
| Drift, ou escorregada, são variações de cálculo de {latitude, longitude, altitude} nos dispositivos portáteis destinados a uso recreativo e esportivo, normalmente dentro de uma margem de erro aceitável. Ocorrem o tempo todo mas, quando a pessoa está em movimento, há uma função nativa dos analisadores de atividade que aproxima o rastro da atividade ao eixo da via mais próxima ao deslocamento, atenuando o drift horizontal. Assim os heatmpaps e cálculos de distância gerados ficam estáveis e confiáveis. Quando a pessoa está parada e não pausa o dispositivo, ele continua calculando {latitude, longitude,altitude,datahora}, algumas erradas, o que gera uma infinidade de rabiscos em torno de onde a pessoa efetivamente esteve parada. |
A margem de erro aceitável varia conforme o uso e o custo do dispositivo:
- Alto Drift (uso recreativo e esportivo): O erro é. em parte, propositalmente embutido e maior para equipamentos portáteis como ciclocomputadores (Xoss, IGPSport,Garmin, etc) e celulares. Isso impede o uso militar dos componentes. Não há milagres. Há erros necessários e desejávaeis por questão de segurança e preço.
- Mínimo Drift (uso aeronáutico): O erro é mínimo para equipamentos homologados aeronáuticos (ex: Garmin G1000, G2000, G3000), que funcionam muito bem em velocidades subsônicas e são usados até para vôos por instrumentos e aterrisagem em condições de visibilidade zero..
- Drift Militar: Num míssil, o mínimo de drift já geraria um erro significativo, errando o alvo. O erro é zero (ou quase isso) apenas para uso militar (estatal e defesa). Embora o sonho seja um receptor comercial com erro zero(ou quase) , isso facilitaria a mira de mísseis, drones e outras armas para grupos terroristas.
Confesse: o teu sonho (e o meu) é que um receptor de GPS/Glonass/Galileo/etc com erro zero tivesse um preço acessível e fosse encontrável nos ciclocomputadores comerciais, ainda que nos mais caros, como um Garmin. Sonhou? Agora acorde e sigamos adiante.
2.1. Drift vertical: erros na altitude de um ponto e altimetria de uma atividade (acumulado em milhares de pontos)
Enquanto as variações horizontais {latitude, longitude} podem ser facilmente atenuadas aproximando o rastro da atividade ao eixo das vias, porque no plano horizontal todos os sistemas e aplicativos usam o mesmo ponto de referência no planeta para {latitude=0 e longitude=0} e a mesma escala 360º em qualquer direção (considerando a Terra como um geóide flutuando no Cosmos), o drift vertical {altitude} não tem a mesma sorte.
Primeiro, há diferentes métodos para medir a altitude de um ponto. Cada método dará uma medida distinta. Medimos a campo? Usamos aerofotogrametria? Usamos satélites? Segundo: é viável medir a altitude metro a metro? Não! Tanto a ESA (agência espacial européia) quanto a NASA (agência espacial norte americana) mediram a altitude de pontos a cada 30m ou 90m de distância horizontal. 30m corresponde a aproximadamente 1 minuto de grau. 90m corresponde a 3 minutos de grau.Lembre-se que a Terra (como esfera) tem 360 graus de leste e 180 graus de Norte a Sul nos mapas comuns (projeção Merkator). Isso nos fornece uma grade de referência.
Veja na imagem abaixo porque as discussões sobre altimetria são intermináveis.
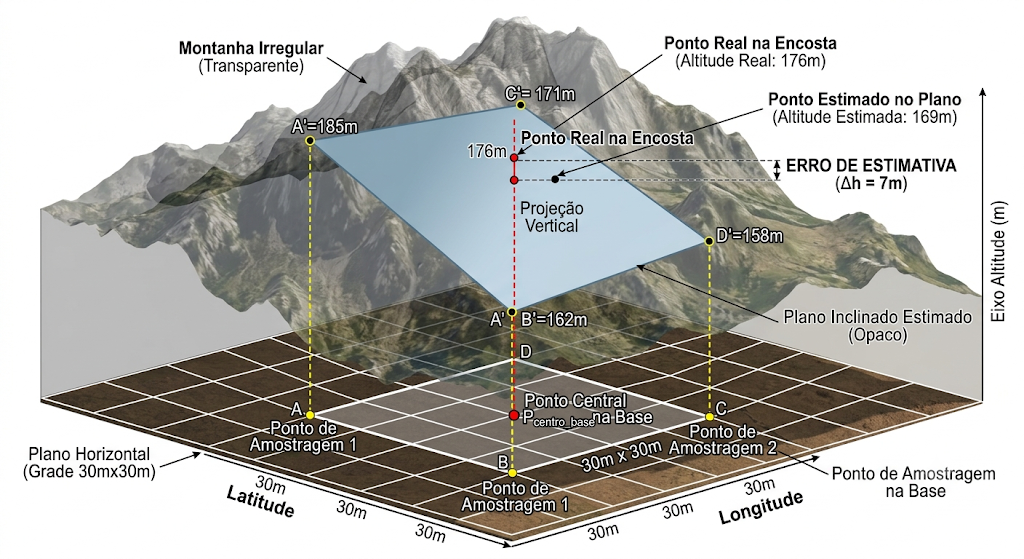
Termos a altitude exata apenas quando passamos sobre um dos pontos da quadrícula de onde ela é efetivamente medida. Para todos os outros pontos, haverá um erro entre a altitude real e a altitude estimada, definido pela distãncia entre plano inclinado gerado pelos quatro pontos efetivamente medidos e o ponto real. Cada agência espacial gera uma quadrícula com altitudes levemente diferentes, (há anos entre a medição por uma agência ou outra e nesse tempo o relevo, e a vegetação que o encobre, mudam. As principais quadrículas utilizadas são o Copernicus (ESA, efetivamente medidos a cada 30m ) e o SRTM (NASA, medidos efetivamente a cada 90m). No Brasil, a quadrícula TOPODATA do INPE utiliza dados SRTM melhorados, conforme o diagrama:
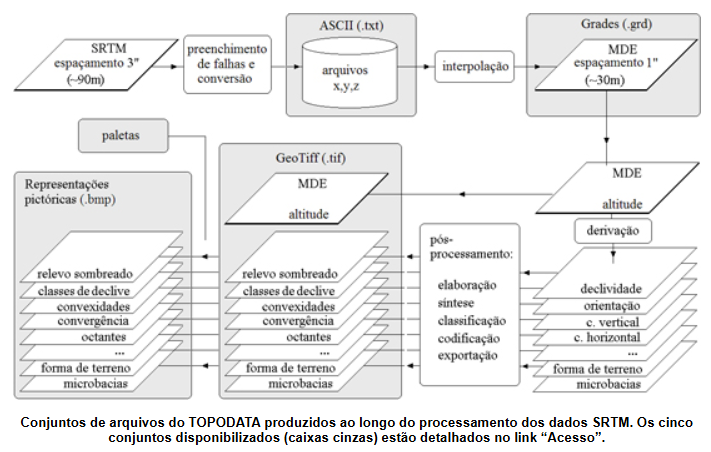
publicado em http://www.dsr.inpe.br/topodata/dados.php.
Como conviver com essa variabilidade de medições de altitude? Usando as funções “Corrigir distância” e “Corrigir altimetria” renomeada para “Elevação correta”, no Strava. Essas funções não “corrigem” no sentido de passar de um dado errado para um certo absoluto, ela atenua o drift horizontal (corrigir distância) e atenua o drift vertical passando a altitude de cada ponto atenuado {latitude, longitude} para um denominador comum, uma mesma quadrícula de altitudes com seu próprio erro de estimativa para cada pontor eal {latitude,longitude}.
Ainda assim, por quê duas pessoas passando ao mesmo tempo, na mesma rota, usando o mesmo modelo de ciclocomputador e usando aa funções de “Corrigir distãncia” e “Elevação correta” obtém distãncias e altimetrias diferentes? Lembre-se do drift! Os erros horizontais são aleatórios e as funções dos sistemas aproximam os pontos errados ao eixo da via, eles não projetam EXATAMENTE sobre o eixo da via. Isso porque ninguém anda no eixo o tempo todo, o aceitável é andar mais ao bordo, ou no acostamento, criando uma faixa aceitável de alguns metros distante do eixo, para um lado ou para o outro. Quanto mais inclinado lateramente for o trecho, esperamos uma maior variabilidade de altimetria para dois ciclistas, com mesmos ciclocomputadores, ao mesmo tempo, na mesma rota. Se o erro fosse igual para as duas pessoas, não ficaria fácil para os terroristas ajustarem a mira de seus misseis? Lembre-se disso. Essa grande vcariabilidade, além de baratear os dispositivos, também é uma questão de segurança, tanto para EUA, União Europeia, Rússia, China, etc (até para o pacífico Brasil).
Aprenda mais sobre Drift vertical (erro em um ponto específico) e variações na altimetria de uma atividade (erro acumulado em milhares de pontos), brincando com nossa ferramenta de interpolação e estimativa de erro, baseada na figura da encosta de montanha.
Simulador de Erro de Estimativa de Altitude (Drift Vertical)
Ajuste as altitudes medidas nos quatro cantos da grade de amostragem de 30m x 30m para definir o Plano Inclinado Estimado. Insira a altitude real medida exatamente no centro da grade para calcular o erro resultante.
Altitude Estimada no Plano: — m
ERRO DE ESTIMATIVA (Δh): — m
Disclaimer ou, em português, avisos anti-xoxorô:
1) Este é um artigo escrito por e para LEIGOS, voltado para o contexto do Cicloturismo.
2) LEIGOS que usam dispositivos de uso RECREACIONAL e ESPORTIVO.
3) Me permiti um certo grau de “liberdade poética” para tornar um assunto puramente técnico um pouco mais palatável a um publico extremamente diversificado.
4) Este artigo visa unicamente compartilhar a noção básica sobre porquê as medições de distância e altimetria que obtemos dos dispositivos não são exatas em nossas atividades ao ar livre.
5) Este artigo não é, nem pretende ser, um artigo representativo de rigorosas verdades acadêmicas ou de técnicas apuradas irrefutáveis.
6) Verdadeiros Especialistas no tema sempre poderão iniciar seus comentários sobre esse artigo com “Na verdade,…. ” e discorrerem horas sobre o tema.
7) Verdadeiros Comentaristas de Botequim sempre poderão iniciar seus comentários sobre este artigo com “Na verdade….” e explanerem como “verdades” seus achismos e desejos infundados.
8) Sinta-se livre para não concordar, no todo ou em parte.
9) Sinta-se livre para usar um Garmin G3000 em sua próxima pedalada.
10) Todo esse artigo parte da premissa que a Terra é um Geóide num UNiverso Caótico . Sinta-se livre para considerar a Terra Plana.
11) Esse artigo usa linguagem neutra.. Não foram consideradas diferenças identidade de gênero, religião, raça ou qualquer outra.
